





199-5165-6231
+86-025-84588073

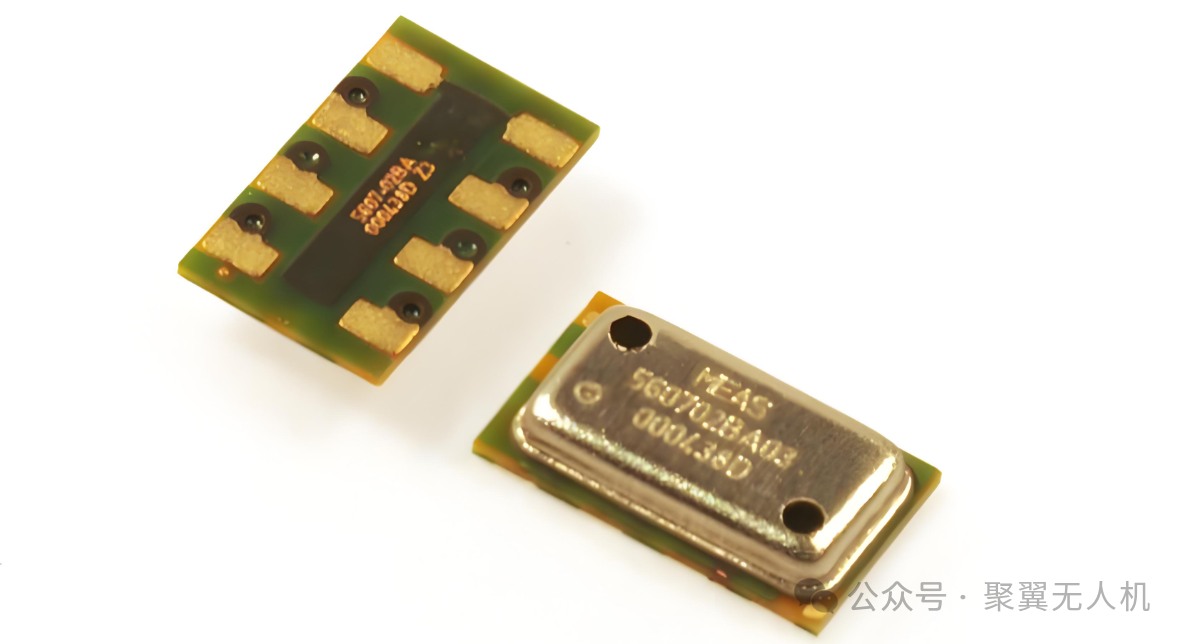
气压计作为测量大气压力的工具,装备到无人机上能使得无人机能够精确地感知高度变化,这对飞行稳定性和自动化操作至关重要。气压计因其实时响应快、功耗低等优点,成为无人机高度测量的理想选择,显著提升了无人机的性能和功能。
1、气压计的工作原理 气压计基于大气压力随海拔升高而降低的原理工作。根据博伊尔定律,当温度恒定时,封闭容器内的气体压力与体积成反比。在大气环境中,这意味着地面附近的空气密度较高,因此压力较大;而随着海拔增加,空气稀薄,压力也随之减小。气压计通过测量这种压力变化来计算海拔高度。
传统的模拟式气压计使用机械结构,如弹簧或膜片,以物理位移反映压力变动;现代数字式气压计则利用半导体技术,例如电容式或压阻式传感器,提供更为精确和稳定的读数。为了提高精度,气压计通常会进行温度补偿,因为温度变化会导致空气密度改变,从而影响测量结果。此外,校准过程也是确保准确性的重要环节,它涉及到设置基准点和调整参数以适应特定环境条件。
2、气压计在无人机中的作用
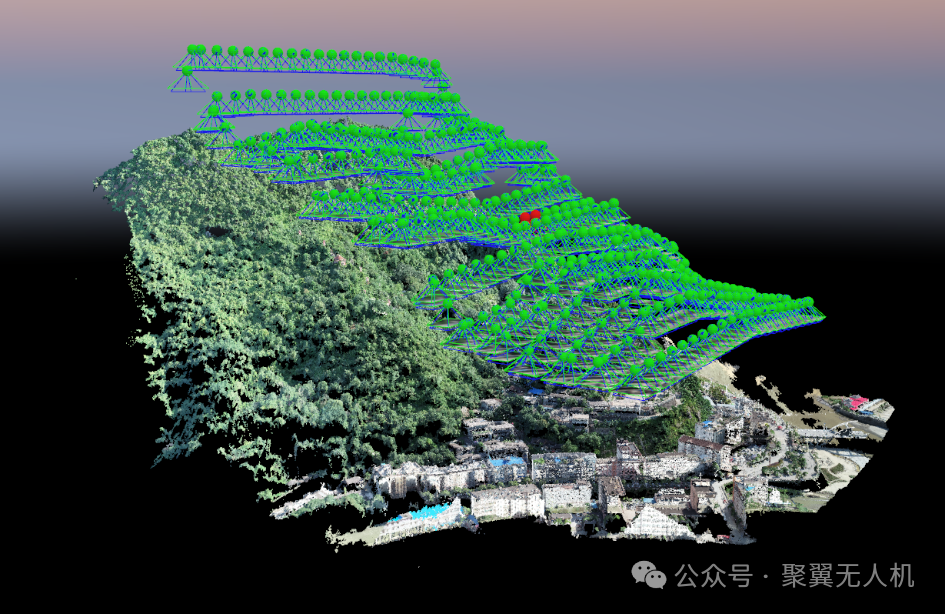
高度测量 气压计为无人机提供了关键的高度信息,使它们能够在设定的高度上保持稳定飞行。通过比较起飞前记录的基准压力值和飞行中实时测得的压力值,无人机可以确定当前相对于起始点的高度。这种相对高度测量对于许多应用来说非常有用,比如航拍时维持固定高度拍摄,或是执行任务时避免障碍物。自动高度保持功能允许无人机在遭遇风力或其他外部因素干扰时,依然能保持预定高度,确保飞行安全和平稳。 起飞和降落 在起飞阶段,气压计帮助无人机识别是否已经达到了预设的安全高度,并通知系统关闭初始加速模式,转入正常飞行状态。同样,在降落过程中,它可以指示无人机何时接近地面,触发减速机制并准备着陆。这不仅提高了降落的精确性,也减少了对地面设施或人员的风险。 地形跟随 对于需要在复杂地形上空作业的无人机,如农业监测或地质勘探,气压计配合其他传感器可以实现地形跟随功能。无人机可以根据地面起伏动态调整飞行高度,保证了图像采集的质量和数据的一致性。虽然气压计单独使用时可能难以处理短距离内的快速高度变化,但结合超声波或激光测距仪等短程传感器,就可以克服这一局限,实现更精细的控制。
多传感器融合
无人机中的多传感器融合是指将来自不同类型的传感器的数据结合起来,以获得更加准确和可靠的信息。在这个框架下,气压计与GPS、惯性测量单元(IMU)、视觉传感器、超声波传感器等共同协作。例如,GPS可以提供绝对地理位置和粗略高度信息,而气压计则补充了精确的高度数据。IMU负责检测加速度和角速度,有助于判断无人机的姿态和运动趋势。当GPS信号丢失时,气压计和IMU的组合可以继续提供高度和姿态信息,确保无人机不会失去控制。此外,视觉传感器可用于辅助定位和避障,超声波传感器适合近距离高度测量。这些传感器的综合运用增强了无人机的自主能力和安全性,使其能够在各种条件下稳定运行。

3、挑战与解决方案
尽管气压计在无人机中发挥重要作用,但它也面临一些挑战。天气变化如气温波动、湿度和气流会影响气压读数,导致高度测量误差。另外,硬件故障或者信号干扰也可能造成误判。为了应对这些问题,开发人员采用了多种策略和技术进步。先进的算法如卡尔曼滤波器被用来过滤噪声和纠正偏差,新材料的应用提高了传感器的耐用性和抗干扰能力。同时,定期校准和维护是保证气压计长期稳定工作的基础。此外,采用冗余设计,即安装多个传感器并交叉验证数据,也可以有效提升系统的可靠性。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
