





199-5165-6231
+86-025-84588073
无人机智能避障技术的设计与实现涉及多个方面,以下是该技术的详细解析:
一、核心组成
无人机避障技术主要依赖于传感器、控制系统和算法。这些组件共同工作,使无人机能够在飞行过程中自主识别障碍物并采取相应的避让行动,以确保飞行安全。

二、传感器技术
避障系统中常用的传感器包括雷达、激光雷达(LiDAR)、摄像头、超声波传感器等。
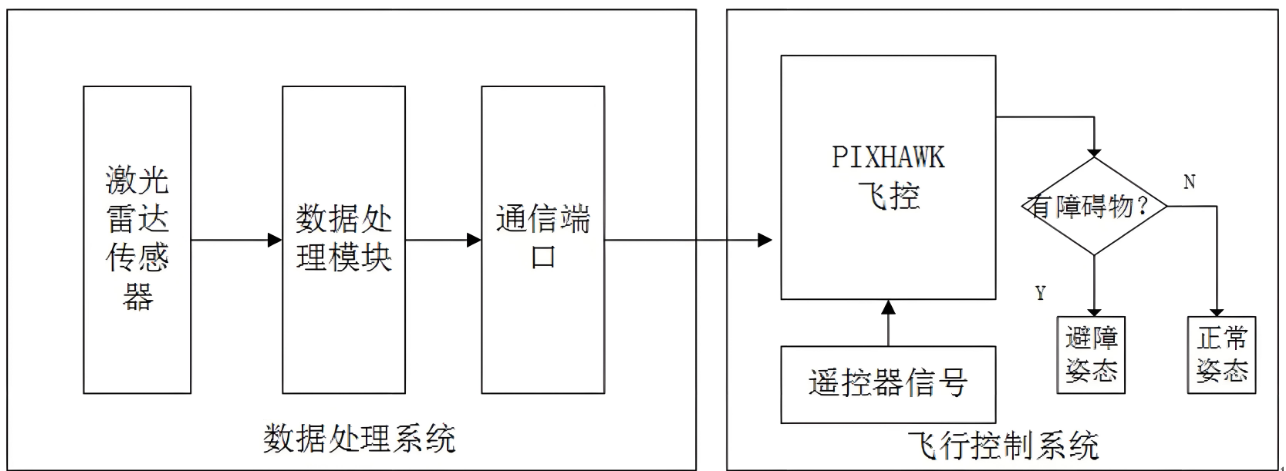
1. 雷达和激光雷达(LiDAR):通过发射无线电波或激光束并测量反射回来的时间,计算障碍物的距离和形状。
2. 摄像头:主要用于视觉避障,通过图像处理技术识别障碍物。
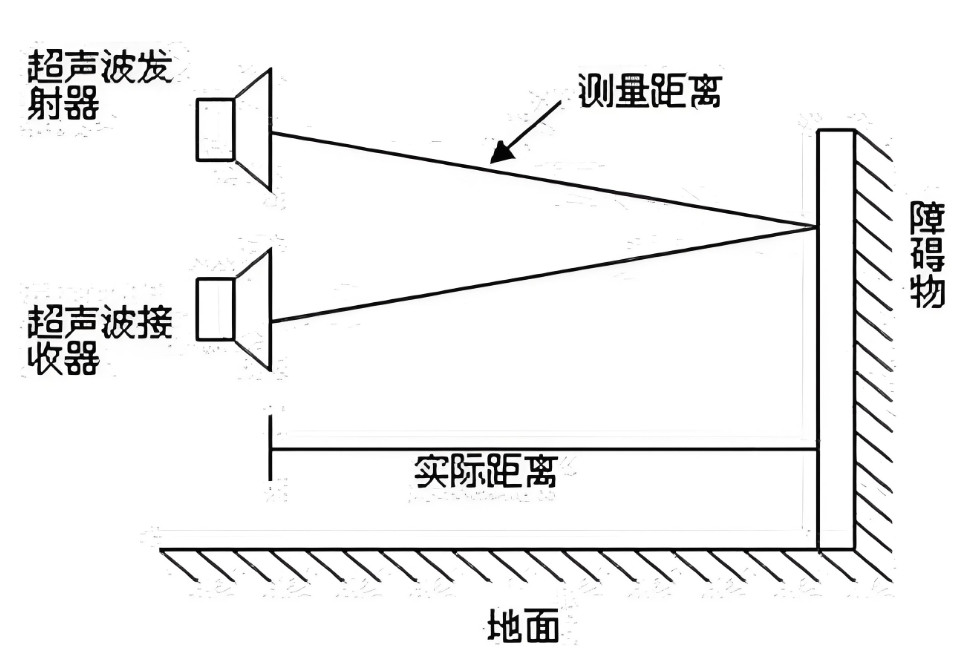
3. 超声波传感器:通过发射超声波并测量反射回来的时间,计算障碍物的距离。
三、避障算法设计与优化
1. 基本算法:基于传感器数据,设计基本的避障算法,如基于距离的避障、基于视觉的避障等。
2. 算法优化:通过机器学习、深度学习等技术,不断优化避障算法,提高避障的准确性和效率。
四、障碍物识别与跟踪
1. 障碍物识别:利用图像处理和计算机视觉技术,从传感器数据中识别出障碍物。
2. 障碍物跟踪:对识别出的障碍物进行持续跟踪,预测其运动轨迹,为无人机的避障提供决策依据。
五、飞行轨迹规划与调整
1. 全局轨迹规划:在飞行前,根据任务需求和地图信息,规划出无人机的全局飞行轨迹。
2. 局部轨迹调整:在飞行过程中,根据避障算法和障碍物跟踪结果,实时调整无人机的局部飞行轨迹,确保无人机能够安全避障。
六、系统集成与测试
1. 系统集成:将传感器、避障算法、轨迹规划等模块进行集成,形成一个完整的无人机避障系统。
2. 系统测试:在各种环境下对避障系统进行测试,确保系统的稳定性和可靠性。
七、实际应用
一些主要的应用实例:
1. 灾区救援与消防灭火:在灾区救援和消防灭火等场景中,无人机需要穿越建筑物、森林等复杂环境进行侦查或救援工作。避障功能可以提高无人机的安全性和工作效率,为救援工作提供有力支持。
2. 航空摄影:无人机在航空摄影中需要拍摄城市、景区等大型场景。避障功能可以有效避免无人机与建筑物等障碍物的碰撞,提高拍摄质量和安全性。
3. 物流领域:在物流领域中,无人机被用于配送货物、快递等物品。避障功能使得无人机在遇到障碍物时能够快速识别并悬停下来,等待飞手的指令,或者自主绕开障碍物。
4. 农业无人机应用:农业无人机在农作物监测、施肥、打药等方面发挥着重要作用。避障技术的应用使得无人机能够在农田中安全飞行,避免碰撞作物和障碍物,提高了作业效率和准确性。
5. 城市交通管理:无人机避障技术可以应用于城市交通管理中,如交通监控、违章拍摄等。无人机能够在繁忙的城市交通中灵活飞行,实时监测交通状况,提高交通管理效率。
6. 建筑施工监控:在建筑施工现场,无人机可用于施工监控和进度评估。避障技术的应用使得无人机能够在复杂的施工环境中安全飞行,为施工管理和监控提供有力支持。
7. 环境保护与监测:无人机在环境保护领域有着广泛的应用,如空气质量监测、水源地保护等。避障技术使得无人机能够在复杂的环境监测区域安全飞行,为环境保护工作提供重要支持。
综上所述,无人机智能避障技术的设计与实现是一个复杂而精细的过程,涉及多个方面的技术和算法。飞狸科技认为,通过不断的技术创新和优化,无人机避障技术将朝着更高精度、更快速度、更强适应性的方向发展,为无人机的广泛应用提供有力支持。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
