





199-5165-6231
+86-025-84588073
无人机技术的迅猛发展,不仅推动了航空领域的革新,还在农业、环境监测、灾害救援等多个领域展现出巨大的应用潜力。在这一背景下,无人机智能飞行算法板卡的设计理念显得尤为重要,它直接关系到无人机的飞行性能、任务执行效率以及整体智能化水平。
一、高度集成与模块化设计
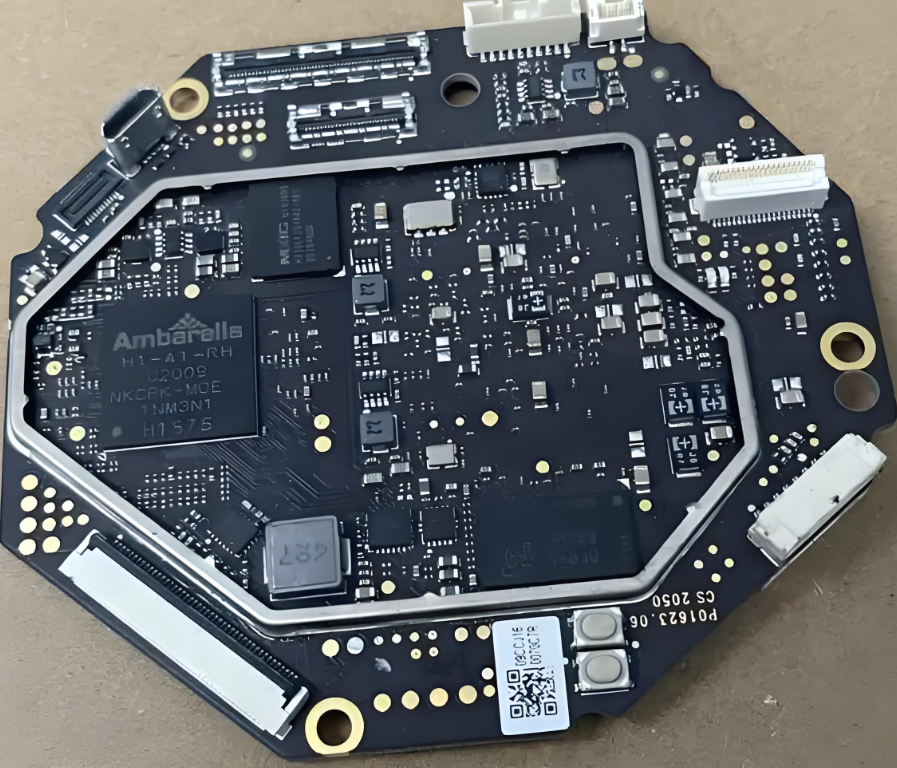
无人机智能飞行算法板卡的设计首先强调高度集成与模块化。高度集成意味着将各种功能组件,如处理器、通信模块、定位导航模块、传感器接口等,尽可能地整合在一块紧凑的板卡上。这不仅可以减少无人机的整体重量和体积,提高飞行效率,还便于后期的维护和升级。模块化设计则使得各个功能模块可以独立工作,通过标准化的接口进行连接和通信。当某个模块出现故障时,可以迅速更换,而无需影响整个系统的运行。
二、强大的数据处理能力
无人机在飞行过程中,需要实时处理来自各种传感器(如摄像头、陀螺仪、加速度计等)的大量数据,以实现对飞行姿态、位置、速度等参数的精确控制。因此,智能飞行算法板卡必须具备强大的数据处理能力。这包括高速的数据采集、存储、传输和分析能力,以及先进的算法支持,如目标识别、路径规划、自主避障等。通过集成高性能的处理器和优化的算法库,无人机可以在复杂环境中快速做出决策,确保飞行的安全性和稳定性。
三、实时性与低功耗
实时性是无人机智能飞行算法板卡设计的另一个关键要素。无人机在飞行过程中,需要实时响应地面控制站的指令,并根据环境变化调整飞行策略。这就要求算法板卡能够迅速处理数据并输出控制指令,确保无人机的实时响应能力。同时,为了延长无人机的续航时间,算法板卡在设计时还需考虑低功耗。通过采用低功耗的处理器、优化算法和电源管理策略,可以有效降低无人机的能耗,提高任务执行效率。
四、智能避障与自主导航
智能避障和自主导航是无人机智能飞行算法板卡的核心功能之一。通过集成多传感器融合技术和先进的避障算法,无人机可以在复杂环境中自动感知障碍物,并规划出最优的飞行路径。同时,利用高精度的定位导航模块(如GPS、北斗等),无人机可以实现全球范围内的精确定位和自主导航。这不仅提高了无人机的飞行安全性,还拓展了其应用范围,如城市高楼区、山区、森林等复杂地形的飞行作业。
五、开放性与可扩展性
无人机智能飞行算法板卡的设计还应注重开放性和可扩展性。开放性意味着算法板卡应支持多种通信协议和软件接口,便于与其他系统进行集成和互操作。这有助于推动无人机技术的标准化和通用化,降低开发成本。可扩展性则是指算法板卡应能够支持后续的功能升级和扩展,以适应未来技术的发展和市场需求。例如,通过预留接口和升级软件,可以轻松地添加新的传感器或算法,提升无人机的智能化水平。
六、可靠性与稳定性
最后,无人机智能飞行算法板卡的设计必须确保可靠性和稳定性。在恶劣的飞行环境中,算法板卡需要能够承受高温、低温、震动等极端条件,并保持稳定的运行。通过采用冗余设计、故障诊断与恢复等技术手段,可以提高算法板卡的可靠性和稳定性,确保无人机在各种工况下都能安全、稳定地执行任务。
综上所述,无人机智能飞行算法板卡的设计理念应围绕高度集成与模块化、强大的数据处理能力、实时性与低功耗、智能避障与自主导航、开放性与可扩展性以及可靠性与稳定性等方面展开。通过不断优化设计理念和技术实现,可以推动无人机技术的持续进步和创新应用。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
