





199-5165-6231
+86-025-84588073
随着数字化时代的到来,传统的测量方法已经无法满足对精准地理数据的需求,实景三维无人机航空摄影测量技术应运而生。该技术凭借其灵活性高、成本低、数据获取速度快等优势,在地形测绘、城市规划、灾害监测等领域得到了广泛应用。本文将详细介绍实景三维无人机航空摄影测量方案。
一、前期准备

(一)人员组织
项目团队应包括项目经理、技术负责人、航飞数据采集人员、外业控制测量人员以及内业数据处理人员。项目经理负责整体项目的协调与管理;技术负责人把控技术方向与质量;航飞数据采集人员负责无人机的飞行操作与数据采集;外业控制测量人员进行地面控制点的测量与标定;内业数据处理人员则对采集的数据进行处理与分析,生成最终的三维模型。
(二)已有资料收集
收集测区的已有影像资料、测区概况、控制点数据、地形图以及网络地图等信息,为后续的航线规划与数据处理提供参考。
(三)设备配置
选择合适的无人机与相机。以大疆经纬M600为例,其单次飞行续航时间长,飞行速度快,飞行高度高,内置的飞行控制系统与图像传输系统性能优良,可搭载PSDK102S五镜头相机,各镜头能独立开展摄影、POS数据采集等工作,精确度最高可达1cm。同时,还需配备满足控制网及像控点测绘精度要求的GPS设备。
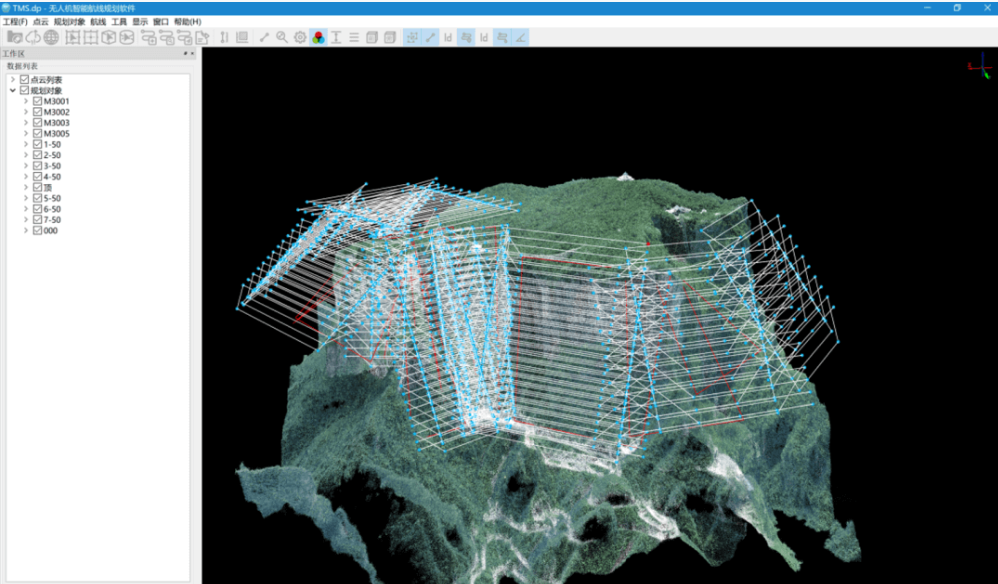
(四)现场踏勘与航线规划
进行现场踏勘,了解测区的地形地貌、障碍物分布等情况。根据相机参数、重叠度及GSD优于0.20米计算航高,一般航向重叠度不小于70%,旁向重叠度不小于40%。航线间距至少为30m,以避免无人机在急转弯时发生事故。同时,应合理划分航摄分区,使分区内的地形高差为最小,当地形高差许可的情况下,航摄分区的跨度应尽量划大。
二、数据采集
无人机按照预设航线飞行,在飞行过程中,相机按照设定的间隔自动拍摄照片,获取目标区域的多角度影像数据。在采集过程中,应选择场地平整开阔、便于全程监控且周围100m范围内无干扰源(如信号发射塔、高压电线等)的起降点,场地面积不小于10m²。
三、后期处理
(一)空三加密
将采集到的影像数据导入专业软件,利用影像特征匹配算法来提取连接点和部分地面控制点,计算出每张照片的精确位置和姿态信息。
(二)模型生成
通过立体像对匹配,生成密集点云模型;再经过模型优化、纹理映射等步骤,最终得到高精度的数字高程模型(DEM)、数字正射影像(DOM)以及三维实景模型。
(三)质量检查与成果提交
对生成的三维模型进行质量检查,包括误差分析、检查点验证等。通过对比GPS控制点测量结果与三维模型的偏差进行分析,评估数据采集和处理过程中存在的误差。检查合格后,提交最终成果。
实景三维无人机航空摄影测量技术为各行业发展提供了有力的数据支持。通过科学合理的方案设计与实施,能够获取高精度的三维地理信息,满足不同领域的应用需求。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
