





199-5165-6231
+86-025-84588073
在无人机的实际飞行过程中,常常会遭遇包含动态障碍物的复杂环境,像移动的车辆、飞行的鸟类等。这对传统的路径规划算法,如 A * 算法、Dijkstra 算法和蚁群算法,提出了严峻的挑战。为了让无人机能够在这类环境中安全、高效地飞行,需要对这些算法进行针对性的改进。
1、A * 算法的改进
(一)实时监测与更新
为适应动态障碍物,需引入实时监测系统,如雷达、视觉传感器等,让无人机能够及时察觉动态障碍物的位置和运动状态。当监测到新的动态障碍物时,A * 算法需要迅速更新搜索空间和启发函数。例如,一旦检测到移动的车辆,就要把车辆的当前位置和预测的移动轨迹纳入到搜索空间的限制条件中。同时,重新计算启发函数 ,使其能够反映新的障碍物对到达目标节点的影响,从而引导算法避开动态障碍物。
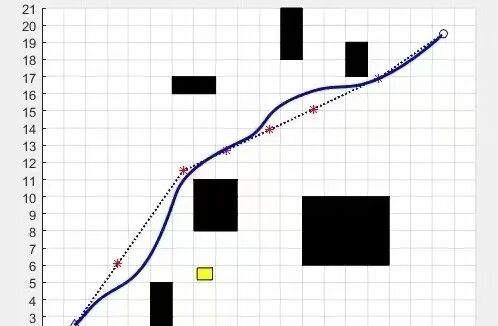
(二)局部重规划
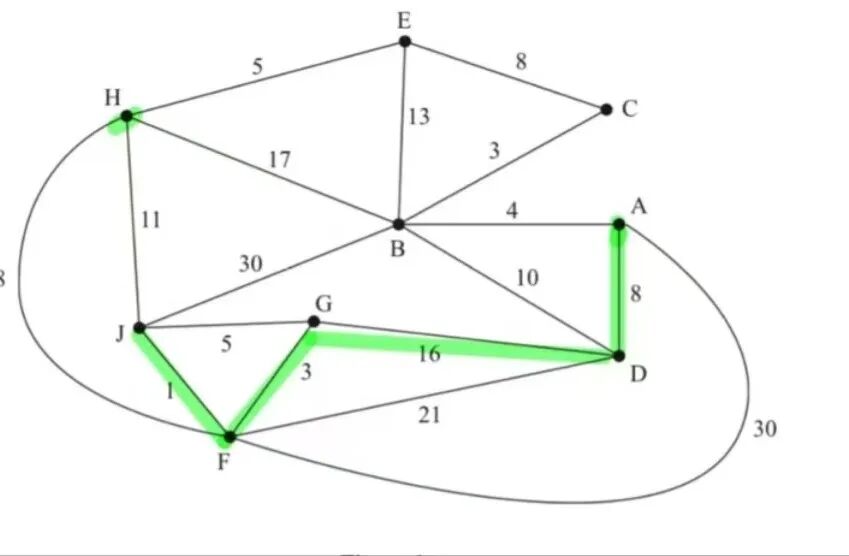
2、Dijkstra 算法的改进
(一)动态图更新
Dijkstra 算法将飞行区域抽象为图,在动态障碍物环境下,需要实时更新图的结构和边的权重。当检测到动态障碍物时,及时删除受影响的边,并根据障碍物的运动趋势,添加新的临时边来表示可能的飞行路径。同时,调整边的权重,使其能够反映绕过障碍物所需的额外代价,比如增加的飞行距离或时间。例如,当有飞行的鸟类靠近时,根据鸟类的飞行速度和方向,动态更新图中相关节点之间的连接和权重,确保算法能够计算出避开鸟类的最短路径。
(二)增量式计算
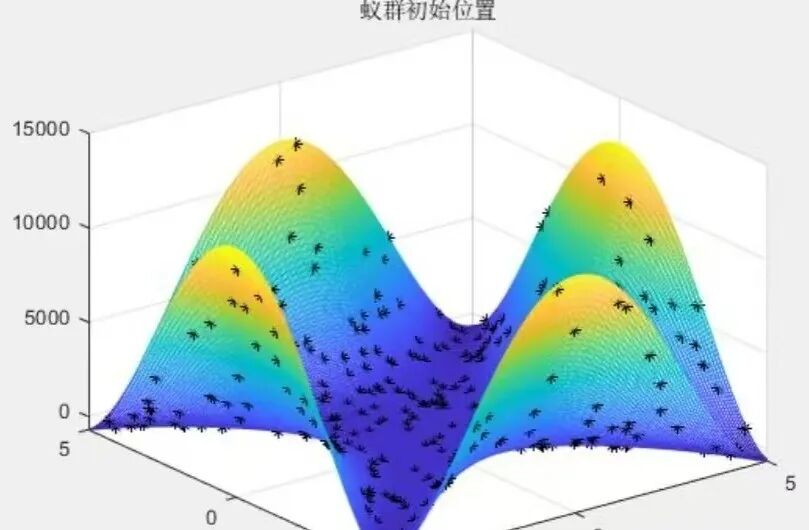
3、蚁群算法的改进
(一)信息素的动态调整
在蚁群算法中,信息素的更新是关键。面对动态障碍物,需要对信息素的更新规则进行动态调整。当检测到动态障碍物时,立即降低受影响路径上的信息素浓度,引导后续无人机避开这些危险区域。同时,在新的安全路径上增加信息素的释放量,加速算法对安全路径的搜索。例如,当无人机检测到前方有移动的车辆时,迅速降低车辆所在路径及周围一定范围内路径的信息素浓度,鼓励其他无人机选择其他路径飞行。
(二)引入预测机制
为了更好地应对动态障碍物,蚁群算法可以引入预测机制。通过对动态障碍物的运动轨迹和速度进行分析,预测其未来的位置。然后,在信息素的更新和路径选择过程中,考虑这些预测信息,提前规划避开障碍物的路径。比如,对于飞行的鸟类,根据其当前的飞行方向和速度,预测它在未来一段时间内可能出现的位置,从而在路径规划时提前避开这些潜在的危险区域。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
