





199-5165-6231
+86-025-84588073
多旋翼和固定翼无人机常见的开源飞控技术详解如下:
开源飞控的定义与发展
开源飞控是建立在开源思想基础上的自动飞行控制器项目,同时包含开源软件和开源硬件。软件部分包含飞控硬件中的固件和地面站软件。随着无人机行业的发展,开源飞控技术经历了三代革新:
1. 第一代(2005\~2010年):使用Arduino或其他类似的开源电子平台为基础,扩展连接各种MEMS传感器,能够让无人机平稳地飞起来。主要特点是模块化和可扩展能力。
2. 第二代(2010\~2015年):大多拥有自己的开源硬件、开发环境和社区,采用全集成的硬件架构。主要特点是高度集成、高可靠性,其功能已经接近商业自动驾驶仪。
3. 第三代(2015年至今):在软件和人工智能方面进行革新,加入了集群飞行、图像识别、自主避障、自动跟踪飞行等高级飞行功能,向机器视觉、集群化、开发过程平台化的方向发展。

常见开源飞控技术详解
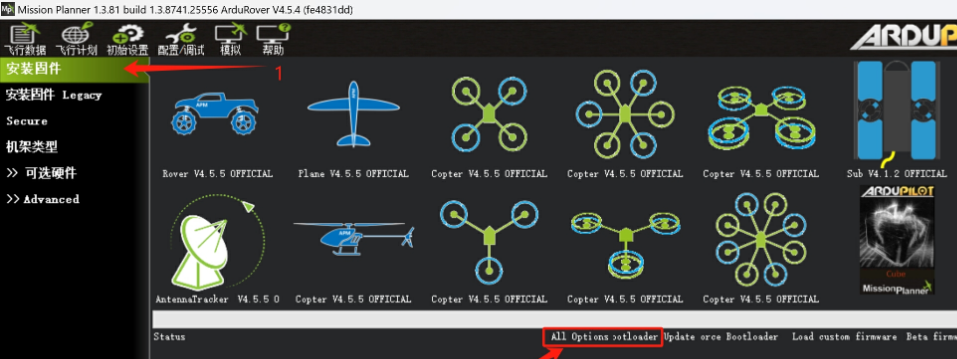
1. APM(ArduPilotMega)
起源与发展:诞生于2007年,基于Arduino生态,是早期最成熟的开源飞控之一。
技术特点:硬件集成三轴陀螺仪、加速度计和磁力计,支持多旋翼、固定翼等机型,并可通过地面站软件Mission Planner实现任务规划。采用两级PID控制,导航级负责路径规划,控制级调整舵机输出。
应用场景:广泛用于农业植保、航拍和科研领域。
2. PX4/Pixhawk
起源与发展:由苏黎世联邦理工学院开发,采用Cortex-M4主控芯片和实时操作系统Nuttx,支持多线程任务调度。
技术特点:模块化设计(如uORB通信机制)允许开发者灵活扩展功能,例如添加视觉避障或集群算法。双冗余传感器设计(如双陀螺仪)提升容错能力,支持高精度定高(误差小于1米)和复杂飞行模式(如“Follow Me”和自主降落)。
应用场景:成为工业级无人机的首选平台。

3. Betaflight
技术特点:专为竞速无人机和穿越机设计,强调低延迟与高响应速度。采用“xEast-yNorth-zUp”坐标系,优化PID调参流程,支持Blackbox日志分析,便于快速调试飞行性能。
应用场景:多见于竞速比赛。
4. iNav(Intelligent Navigation)
技术特点:扩展了自主功能(如定点悬停、自动返航),适用于FPV航拍与轻量级任务。融合GPS与光流传感器,实现室内外定位,支持Waypoint导航和简易任务规划。
应用场景:用于小型航拍机和DIY项目。
5. OpenPilot
起源与发展:由OpenPilot社区于2009年推出的自动驾驶仪项目,旨在为社会提供低成本但功能强大的稳定型自动驾驶仪[2]。
技术特点:硬件架构非常简单,官方发布的飞控硬件包括CC、CC3D、ATOM、Revolution、Revolution nano等,衍生硬件包括Sparky、Quanton、REVOMINI等。
6. Multi Wii Copter(MWC)
技术特点:一款典型的Arduino衍生产品,是专为多旋翼开发的低成本飞控,完整地保留了Arduino IDE开发和Arduino设备升级和使用的方法。支持常见的四、六、八旋翼以外,还支持很多奇特的飞行器类型,比如三旋翼、阿凡达飞行器(BIcopter avatar style)、Y4型多旋翼(其中两轴为上下对置)等。
7. KK飞控
技术特点:源于韩国的一款开源飞控项目,也是第一种广为大众接受的多旋翼飞控。该飞控只使用三个成本低廉的单轴陀螺,配合一台最简单的四通道遥控设备,就能控制常见的三、四、六旋翼飞行器,并且支持“十字”型、X型、H型和上下对置等多种布局。
综上所述,多旋翼和固定翼无人机常见的开源飞控技术具有各自独特的技术特点和应用场景。飞狸科技认为,随着技术的不断发展,这些开源飞控将继续推动无人机技术的创新和应用拓展。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
