





199-5165-6231
+86-025-84588073
以下为APM与PX4开源飞控系统的深度对比分析,结合架构设计、应用场景及生态支持等维度,综合最新技术动态进行阐述:
一、起源与核心定位差异

1. APM(ArduPilot Mega)
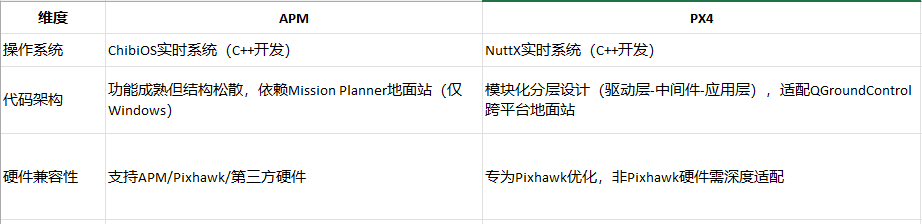
历史背景:2007年诞生于DIY无人机社区,基于Arduino平台开发,是早期最成熟的开源飞控之一。
定位特点:覆盖多旋翼、固定翼、无人车船等全平台控制,强调功能丰富性与跨硬件兼容性。
2. PX4
历史背景:由苏黎世联邦理工学院(ETH)主导开发,专注于飞行器专用控制,后成为Pixhawk硬件官方固件。
定位特点:聚焦模块化架构与实时性能优化,支持多旋翼、VTOL等飞行器,但暂不支持非航空载具。
二、技术架构对比
关键差异点:
- 扩展性:PX4模块化架构更易集成新传感器(如激光雷达SLAM),而APM需修改核心代码。
- 实时性:PX4任务调度延迟≤5ms,适合高动态场景(如竞速穿越);APM延迟约10-20ms,但稳定性久经验证。
三、功能特性与应用场景
1. 控制性能
APM:
- 采用两级PID控制(导航级+控制级),适应复杂环境(如农田低空喷洒)。
- 支持光流定高、自动返航等工业级功能,农业领域占比超60%。
PX4:
自适应控制算法(如MC_FW_ATT_CTRL模块),在VTOL姿态切换中响应更快。
- 内置故障注入测试框架,适合安全苛求场景(如物流无人机)。
2. 典型应用场景

| 农业植保 | 喷洒航线规划成熟,社区案例丰富 | 电池管理精准,续航提升15% |
| 物流无人机 | 兼容车载雷达等外设 | 抗风性更强(支持8级风) |
| 科研开发 | 二次开发文档齐全[citation:4] | 仿真生态完善(Gazebo+SITL) |
四、开发者生态与学习成本
- APM生态:
- 社区资源:全球最大开源飞控社区,GitHub提交超10万次,疑难问题解答率高。
- 学习曲线:需掌握Mission Planner调参逻辑,新手调试周期约2周。
- PX4生态:
- 开发工具:提供Dronecode SDK标准化接口,支持Python/ROS开发。
- 学习成本:模块文档清晰(如uORB通信机制),但深度定制需理解实时系统原理。
五、未来演进方向
1. APM:向边缘计算融合发展,计划集成AI作物识别模型(如水稻病害实时分析)。
2. PX4:强化集群控制能力,2025年将支持100+无人机编队协同。
总结:选型决策指南
- 选APM:需要农业/车船多平台支持、快速项目落地、硬件兼容性强。
- 选PX4:追求工业级实时性、参与前沿科研、需深度定制化开发。
> 技术趋势:两者正加速融合——APM已移植至Pixhawk硬件,PX4亦借鉴ArduPilot的导航算法,开发者可根据项目阶段混合使用(如APM任务规划+PX4底层控制)。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
