





199-5165-6231
+86-025-84588073
以下为无人机集群飞行控制模块功能的系统性详解,结合核心技术架构与实现逻辑,分为四大核心模块展开:
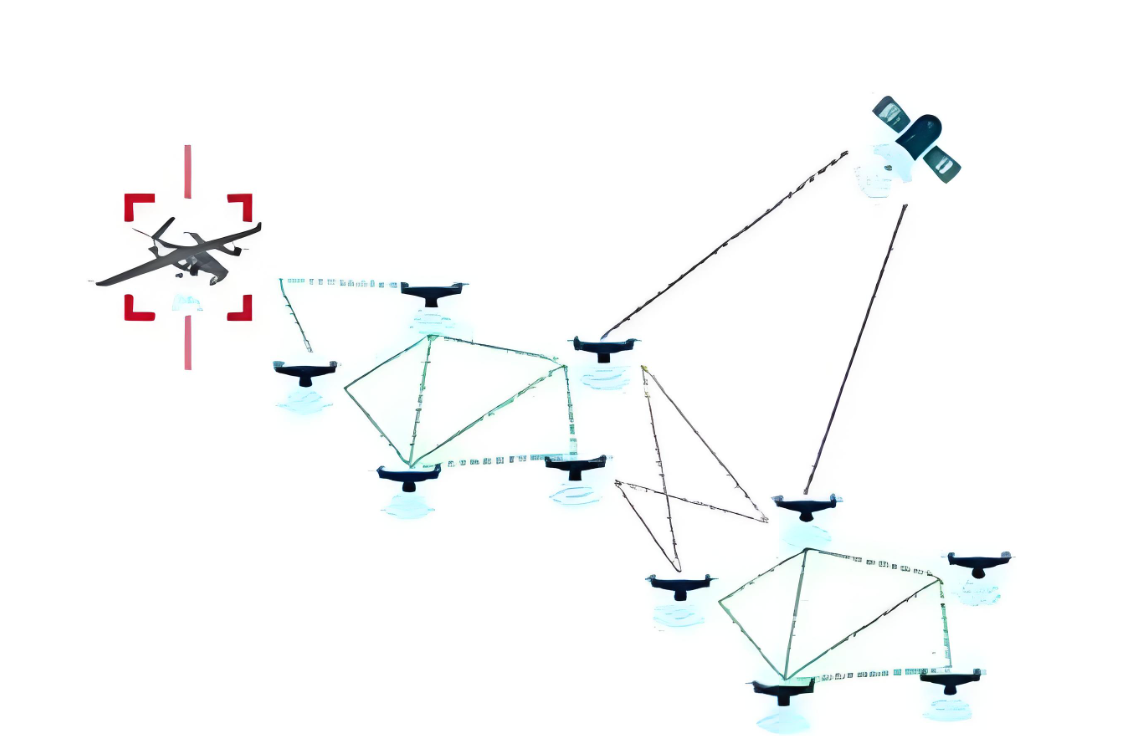
一、协同通信与精准定位模块
1. 高精度定位系统
RTK定位技术:通过实时动态差分定位实现厘米级空间精度(定位误差<2cm),确保编队中每架无人机的绝对位置精确同步。
相对位置测算:无人机搭载UWB(超宽带)模块,可在0.1秒内完成相邻无人机相对位置计算,支撑动态编队调整。
2. 分布式通信网络
采用自组网技术(如Wi-Fi Mesh、LoRa),实现集群内数据高速共享(延迟≤50ms),确保指令实时同步。
主机-副机分级架构:主机接收全局指令并解算,副机通过专用通信协议获取分指令,降低中心节点负载。
二、分布式决策与路径规划模块
1. 编队控制算法
| 长机-僚机法 | 长机引领路径,僚机根据相对位置偏移量动态跟随,层级传递控制指令 | 军事侦察、仪式表演 |
| 人工势场法 | 模拟引力(目标点)与斥力(障碍物/相邻无人机),通过力学模型自动避障| 复杂地形勘探 |
| 虚拟结构法 | 将编队抽象为刚性几何结构,无人机锁定虚拟节点位置移动 | 大规模集群灯秀 |
2. 动态路径规划
基于环境建模(如3D点云地图)实时生成最优航线,支持突发障碍物重规划(响应时间<1秒)。
任务分配机制:根据无人机性能差异(续航、载荷)自动分配子任务,提升集群效率约40%。
三、集群协同执行与控制模块
1. 飞行动态协同
姿态同步控制:通过PID算法调节各无人机俯仰/偏航角,确保编队动作一致性(如“抢包山”包裹接力需0.1秒级同步)。
自适应队形变换:根据任务需求切换菱形、箭形等队形,支持空中动态重组。
2. 抗扰动能力强化
风阻补偿模型:依据气压计与IMU数据实时调整电机转速,维持编队在6级风内的稳定性。
容错控制机制:单机故障时,邻近无人机自动填补空位并接管任务。
四、智能安防与状态管理模块
1. 实时碰撞规避
基于毫米波雷达与视觉融合感知,预测碰撞轨迹并触发紧急避让(生效距离≥10米)。
电子围栏系统:自动识别禁飞区并强制绕行,违规操作触发自动返航。
2. 集群健康监测
电池联动管理:低电量无人机优先降落,其余无人机动态分担其任务。
自诊断系统:实时监控电机温度、GPS信号强度等参数,异常数据即时上报地面站。
应用场景与技术挑战
典型场景:
物流配送:集群协同实现包裹空中接力(如无人机“抢包山”)。
农业植保:50+无人机编队同步喷洒,覆盖效率提升3倍。

现存挑战:
超大规模集群(>100架)通信拓扑优化问题。
密集编队下的气动耦合干扰尚未完全解决。
> 技术演进方向:
> 1. 人工智能深度嵌入:强化学习优化集群在未知环境中的协同策略。
> 2. 数字孪生预演:通过仿真平台(如RflySim)预测试验编队可行性。
该系统通过“感知-决策-执行-保障”闭环,实现集群智能从理论到工业级应用的跨越,推动物流、救援、智慧城市等场景的革命性突破。
本文内容来源网络,如有侵权或其他事宜,请联系本站邮箱。
