

199-5165-6231
+86-025-84588073


QGroundControl(简称QGC)是一款开源的无人机地面站软件,为任何支持MAVLink的无人机提供全面的飞行控制和任务规划,深度数据分析以及与无人机系统其他组件的无缝互动,而且同样也为ArduPilot或PX4 Pro动力车辆提供配置,其主要目标是首次使用和专业用户,非常实用。

另外,QGroundControl在Windows,OS X,Linux,iOS和Android上运行。

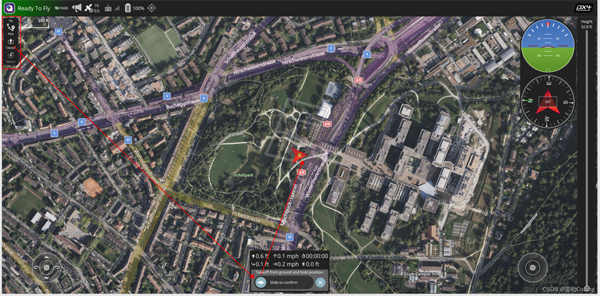
QGroundControl的经典应用组合
QGC的技术架构
技术栈:C++/QT/QML
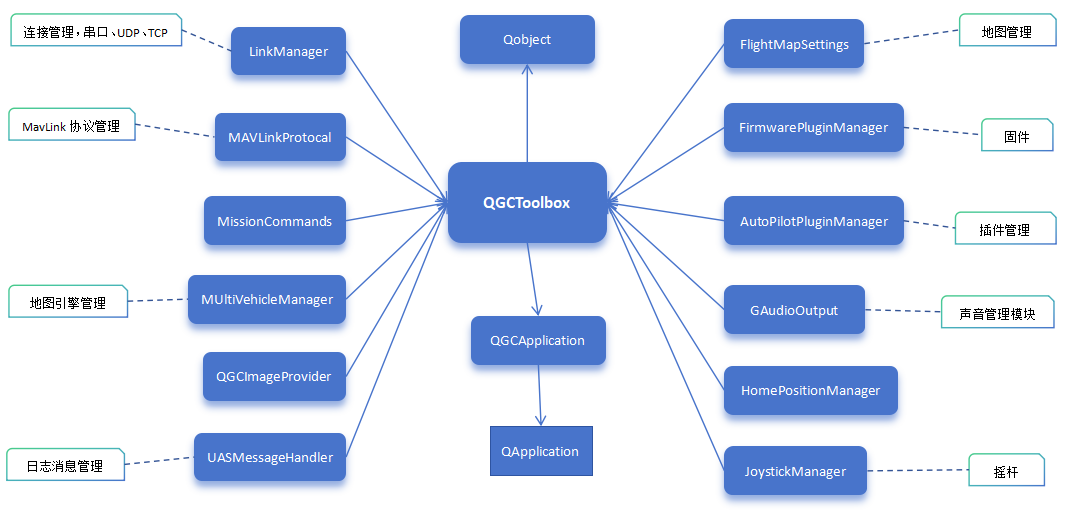
1.前端用户界面(GUI):这是用户直接交互的部分,使用Qt库构建,提供图形化的用户界面,包括地图、仪表盘、控制面板等,显示飞行器状态、地图、航点、传感器数据等。
2.后端服务:这部分负责处理来自飞行器的实时数据流和控制指令。它通常包含一个串口或网络通信模块,用于与飞行器(如无人机)进行通信,使用Mavlink协议进行数据交换。
3.数据处理和逻辑:这部分负责解析接收到的Mavlink消息,更新状态信息,执行飞行控制算法(如PID控制器),以及处理航点管理、航迹规划等高级功能。
4.数据库和文件管理:QGC使用SQLite等轻量级数据库来存储航点、设置、飞行日志等信息,方便用户管理和检索。
5.模块化设计:QGC通常采用模块化设计,使得各个功能模块(如飞行控制、航迹规划)独立开发和测试,方便扩展和维护。
6.多平台支持:QGroundControl支持Windows、macOS和Linux等操作系统,这需要跨平台的开发技术和适配。
7.插件和扩展:QGC允许用户添加自定义插件,以扩展其功能,如支持特定无人机型号的专有功能。
8.后台服务和资源管理:QGC有后台进程负责资源管理(如内存和CPU)以及与操作系统交互,以确保软件的稳定运行。
QGC二次开发
界面定制修改
功能定制修改
功能新增定制开发
常见应用场景
无人机产品配套软件
界面魔改,功能简化,适应无人机操作体验,适合对地面站软件没有自主研发需求的无人机厂商,或作为研发或测试阶段的过渡产品。无人机项目解决方案定制开发
按照客户项目需求,进行定制开发,界面定制、功能定制、性能优化等其他无人装备使用
无人车、无人船、无人艇等无人装备
